رادارهای GPR (رادار آنالیز زمین برای اکتشاف) آشنایی و نحوه عملکرد
نویسنده: افشین رشید
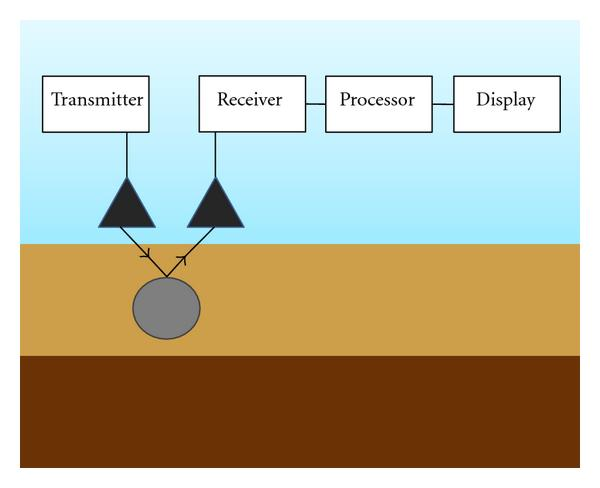
رادار نافذ زمین GPR یک روش ژئوفیزیکی غیر مخرب است که بدون ایجاد مزاحمت در زمین ، امواج پروفیل مقطعی تولید می کند. از پروفایل های GPR برای ارزیابی مکان و عمق اشیاء مدفون و برای بررسی حضور و تداوم شرایط و ویژگی های زیرسطحی طبیعی استفاده می شود. GPR با انتقال پالسهای امواج رادیویی با فرکانس بالا از طریق مبدل یا آنتن ، به داخل زمین عمل می کند. انرژی منتقل شده از اشیاء مختلف دفن شده یا با تماس های مشخص بین مواد مختلف زمین بازتاب می یابد. سپس آنتن موج های منعکس شده را دریافت می کند و آنها را در رایانه ذخیره می کند.رادار نفوذی زمین GPR روشی ژئوفیزیکی بر پایـه انتـشار امـواج الکترو مغناطیسی است که درحکم روشی غیرمخرب بـرای به تصویر در آوردن لایه ها و بی هنجاری های زیرسطحی به کار می رود.ایـن روش بـه ســرعت بــه منزلــۀ یــک روش قابــل اعتمــاد در زمینــه هــای مهندسی عمران، باستان شناسی و کاربردهای دیگر شـناخته شده است .به طورکلی موفقیت در روش GPR ،به عواملی همچـون جنس خاک منطقه، نوع بی هنجاری و هدف مورد بررسی، طراحی صحیح عملیات برداشت و انتخاب درست آنـتن و درنهایت به کارگیری پارامترهای پردازشی مناسـب وابـسته اســت. دو عامــل خــاک محــل برداشــت و هــدف مــورد بررسی، عوامل خارج از کنترل هستند Rx به معنای امواج گیرنده حامل و TX به معنای امواج فرستنده حامل میباشد .که این (بسامد) در سیستم شناسایی رادار GPR مورد استفاده قرار میگیرد.انتخاب آنتن با توجـه بـه حـد تفکیـک هـر آنـتن ، اهمیـت زیادی دارد پردازش در GPR باید با توجه به شرایط ویژه هــر تحقیــق انجــام پــذیرد؛ چرا کــه بــه همــان انــدازه کــه به کارگیری پارامترهای پردازشی مناسب ممکن است مفید باشد؛ پردازش نامناسب میتواند گمراه کننده باشد. ایجاد مسیرهای جدید برای کابـل و یـا لولـه گـذاری در زیر زمین و همچنـین نگهـداری از تاسیـسات زیرسـطحی و محافظــــت از آن، هنگــــام عملیــــات خــــاکبرداری و ساخت و ساز، نیازمند داشتن آگـاهی کامـل از محـل دقیـق تاسیـسات زیـر سـطحی اسـت. توانـایی GPR بـا توجـه بـه وضوح رادارگرام ها، باعث شده است که این روش به منزلۀ روشی با دقت زیاد، در مکـان هـایی ماننـد خیابـان هـای پر تردد و یا سازه های عظیم به کار رود.
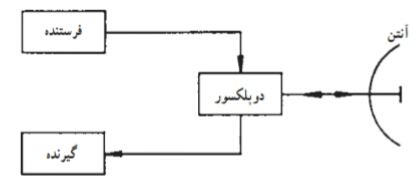
(بلوک دیاگرام) رادار های GPR (رادار آنالیز زمین برای اکتشاف)
در این روش آنتن هایی با پهناهای نوار بسامدی متفاوت(10-2000 مگاهرتز ) به کار گرفته می شود. طیف بسامدی با نام بسامد مرکزی آنتن استفاده شده در برداشت مشخص میشود. بسامد مرکزی، هم عمق نفـوذی موجـک GPR و هم تفکیک پذیری زمـانی و مکـانی رادار گـرام هـا را معـین مــیکنــد.(بنــابر ایــن چگونگی انتخاب آنتن، اصلی ترین عامل در برداشت هـای رادار به شمار می آید. برای مکان یابی بی هنجـاری هـایی بـا اندازه های متفاوت و طبیعتاً در عمـق هـای گونـاگون، یـک سری از مقاطع رادار برداشت شده بـا آنـتن هـای گونـاگون لازم است در برخـی از پروژه ها بـه جـای اسـتفاده از چنـد آنـتن بـا بـسامدهـای گوناگون ، از روشی به نام ترکیب چند بسامدی (Multiple compositing frequency) اسـتفاده مـی شود اگر چـه روش ترکیـب بـه منزلـۀ روشـی کم هزینه، می تواند تا حد مطلوبی موجب افزایش کیفیت و وضوح رادار گرام شود اما روش سـخت افـزاری اسـتفاده از چند آنتن و سـپس بـه کـارگیری پـردازش هـای خـاص هـر آنتن، مزیت های بیشتری از جمله کیفیت داده هـا و وضـوح بیشتر رادار گرام ها را دارد. این موضوع به یک تفسیر جامع برگرفته از چنـد رادار گـرام بـا آنـتن هـای گونـاگون منجـرخواهد شـد. اگـر نوارهـای بـسامدی، بـا توجـه بـه عمـق و چگونگی اهداف مورد بررسی، به درستی انتخاب شـوند و برای یک بررسی مـوردی از چنـدین آنـتن بـا بـسامد هـای مرکـزی متفـاوت اسـتفاده شـود،آنگاه در حین اکتشاف دارای حساسیت در عمق بیشتری خواهد بود.
_1ix1.png)
آنتن GPR در واقع پالس انرژی الکترومغناطیسی را به داخل زمین منتقل می کند. هنگامی که این انرژی به یک جسم می رسد ، پژواک می شود و توسط گیرنده آنتن اسیر می شود. نرم افزارهای رایانه ای از فرکانس پالس های منتقل شده و میزان تأخیر زمانی بین انتقال پالس ها و دریافت ها برای تهیه اطلاعات در مورد هدف استفاده می کنند. دامنه و وضوح عمق مربوط به فرکانس رادار ، قدرت انتقال یافته ، خاصیت الکترومغناطیسی مواد زمینی (خاک) و همچنین به شکل و مشخصات اهداف است.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
مهمترین اعمالی که یک رادار می تواند انجام دهد
نویسنده: افشین رشید
_11dc.jpg)
نکته: مهمترین اعمالی که یک رادار می تواند انجام دهد عبارتند از : 1 -واضح سازی اهداف ، 2 -آشکارسازی ، 3 -اندازه گیری ، 4 -دسته بندی
واضح سازی اهداف مربوط به توانایی رادار در جداسازی سیگنال هدف مطلوب از دیگر اهداف و جداسازی سیگنال مطلوب از سیگنالهای نامطلوب (نویز و موانع) می باشد . در حالت ایده آل می خواهیم که سیگنال اهداف مختلف مستقل از نزدیکی آنها به یکدیگر، از هم متمایز باشند . یکی از عوامل موثر در قابلیت تمایز بین اهداف، سیگنال ارسالی است. پهنای باند بزرگتر برای سیگنال ارسالی وضوح بهتری در پارامتر فاصله را در پی دارد. در حالیکه طول پالس طولانی تر منجر به وضوح بیشتری در فرکانس می گردد. همچنین خصوصیات آنتن نیز در آن موثر است. آنتن ها یی با پهنای باند فضایی کوچک وضوح بهتری را در موقعیت هدف نتیجه می دهد. عمل آشکارسازی شامل تشخیص حضور سیگنال بازگشتی از هدف مطلوب است. این مسئله به ظاهر ساده بنظر می رسد، اما در عمل به علت وجود سیگنال های ناخواسته و نویز گیرنده، عملی پیچیده است. می توان با طراحی مناسب گیرنده و ارسال سیگنالی با انرژی بیشتر در هر پالس اثر نویز را کاهش داد. همچنین با طراحی سیگنال ارسالی و روشهای پردازش سیگنال می توان میزان حضور سیگنال موانع را کم کرد. برای مشخص شدن محل جسم به تعریف دستگاه مختصات نیاز داریم.
_wbgw.jpg)
اندازه گیری فاصله هدف بطور ضمنی در نام رادار نهفته است. اگر چه امروزه رادار های مدرن معمولا پارامترهایی بیشتر از فاصله شعاعی را اندازه گیری می کنند. آنها قادرند موقعیت هدف در فضای سه بعدی، بردار سرعت هدف (شامل سرعت آن در سه مولفه فضا)، جهت زاویه ای و بردار سرعت زاویه ای (نرخ تغییر زاویه در هر دو مولفه زاویه ای) را نیز بدست آورند. تمام این اندازه گیری ها می تواند بطور همزمان برای چند هدف در شرایطی که نویز و موانع نیز حضور دارند، محاسبه شود. اندازه سرعت شعاعی هدف با تغییر فاصله در یک بازه زمانی و یا از طرق شیفت فرکانس داپلر قابل اندازه گیری است. سرعت مطلق و جهت حرکت یک هدف متحرک با ردیابی آن می تواند بدست آید که از اندازه گیری های رادار از محل هدف در یک بازه زمانی محاسبه می شود. به همین روش می توان سرعت زوایه ای را نیز اندازه گیری کرد. بدست آوردن جهت زاویه هدف در یک بعد زاویه ای توسط دو بیم آنتن انجام می شود. این دو بیم به میزان کمی در زاویه جابجا می شوند و با مقایسه اندازه بازگشتی دریافت شده در هر بیم، اندازه زاویه بدست می آید. برای اندازه گیری در هر دو بعد زاویه ای به چهار بیم آنتن نیاز داریم و دقت این اندازه گیری به اندازه آنتن وابسته می باشد . صفحه نمایش رادار برای نشان دادن نتایج بدست آمده به صورت بصری برای کاربر می باشد و دارای انواع مختلفی است. سه نوع از نمایشگرهایی که امروزه در رادارهای کلاسیک بیشتر مورد استفاده قرار می گیرد در اسکوپ تصویر بالا ، جهت عمودی، تابعی از قدرت سیگنال پوش موج بازگشتی از هدف است. این تابعیت می تواند به صورت خطی یا لگاریتمی باشد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات) اجزای اصلی رادار (ساختار کلی عملکرد رادار)
نویسنده : افشین رشید
_(1)_dh7r.png)
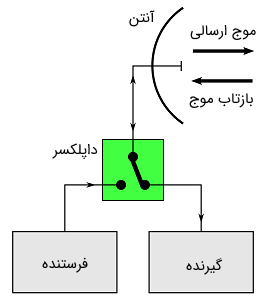
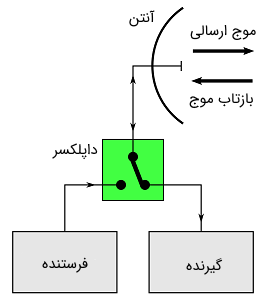
انواع گوناگونی از رادار با کارهای متنوع، اهداف و محیط های عملکرد مختلف وجود دارد که منجر به تفاوت هایی در ساختار آنها گردیده است. اما بطور کلی می توان با ساختاری مشابه، عملکرد اکثر آنها را مورد بررسی قرار داد.ساختار کلی عملکرد رادار بخش فرستنده که به آنتن ارسال متصل است، امواج الکترومغناطیسی را به محیط اطراف منتشر می کند. آنتن گیرنده نیز آماده دریافت هر نوع موج بازگشتی از هدف می باشد. مسیر انتشار موج از فرستنده به هدف و سپس گیرنده کانال سیستم رادار را تشکیل می دهد.آنتن وظیف تبدیل جریان آن به موج الکترومغناطیسی را به عهده دارد. موج با سرعت نور منتشر شده و پس از برخورد با هدف، بخشی از انرژی (t (R وارد r آن بازتاب پیدا می کند. در واقع پس از طی مسافت 2R با سرعت نور، توسط آنتن گیرنده به صورت سیگنال sR سیستم گیرنده می گردد. با حضور این سیگنال، رادار به وجود هدف پی می برد.بخش فرستنده که به آنتن ارسال متصل است، امواج الکترومغناطیسی را به محیط اطراف منتشر می کند. آنتن گیرنده نیز آماده دریافت هر نوع موج بازگشتی از هدف می باشد. مسیر انتشار موج از فرستنده به هدف و سپس گیرنده ، کانال سیستم رادار را تشکیل می دهد. در شکل سیگنال ارسالی با (t(s نمایش داده شده است که آنتن وظیفه تبدیل آن به موج الکترومغناطیسی را به عهده دارد. موج با سرعت نور منتشر شده و پس از برخورد با هدف، بخشی از انرژی (t (R وارد r آن بازتاب پیدا می کند. در واقع پس از طی مسافت 2R با سرعت نور، توسط آنتن گیرنده به صورت سیگنال sRسیستم گیرنده می گردد. با حضور این سیگنال، رادار به وجود هدف پی می برد.
فرستنده که در اینجا بصورت یک تقویت کننده توان نشان داده شده است، شکل موجی متناسب با کاربرد رادار ایجاد می کند. توان متوسط آن می تواند در حدود چند میلی وات و یا به بزرگی چند مگا وات باشد. بیشتر رادارها از شکل موجهای پالس کوتاه استفاده می کنند و در نتیجه قادر خواهند بود با تقسیم زمان ارسال و دریافت تنها یک آنتن داشته باشند. داپلکسر، در حالتی که تنها یک آنتن داریم، برای حفاظت گیرنده از سیگنال ارسالی هنگام روش بودن فرستده می باشد. همانگونه که ذکر شد، وظیفه انتشار امواج و همچنین دریافت موجهای بازگشتی به عهده آنتن رادار است. تقریبا همیشه این آنتن ها به صورت جهت دار انتخاب می شوند به صورتی که بتوانند انرژی تشعشع شده را با یک بیم باریک و متمرکز شده ارسال کنند و به علاوه تعیین جهت هدف را نیز ممکن سازند. در واقع علاوه بر کار ارسال و P0F دریافت آنتن به صورت یک فیلتر فضایی P عمل می کند که زاویه های هدف را نیز مشخص می نماید. این نوع آنتن ها در حالت دریافت نیز دارای سطح موثر بالایی هستند و به این ترتیب دریافت بازگشتی های ضعیف را نیز ممکن می سازد. گیرنده سیگنالهای دریافتی ضعیف را تقویت می کند تا سطح آنها به حدی برسد که قابل شناسایی باشند. در این بین به دلیل اینکه نویز ، توان رادار در آشکارسازی و استخراج خصوصیات هدف را محدود می کند، تلاش می شود.گیرنده نویز کمی را به سیگنال بیفزاید. در فرکانس های ماکروویو که عملکرد اکثر رادار ها در آن محدوده است، نویز در P1F گیرنده از همان طبقه اول یعنی تقویت کننده با نویز کمP حضور دارد. P شناخته می شوند .
علت حضور اهداف نامطلوب در پیرامون رادار
وجود محدوده دینامیکیP3F به علت حضور اهداف نامطلوب در پیرامون رادار که به عنوان موانع P2FP بالا برای گیرنده لازم است. زیرا ممکن است برگشتی های موانع ، گیرنده را به حالت اشباع ببرند و آشکارسازی سیگنال های بازگشتی از اهداف مطلوب ، انجام نگیرد. محدوده دینامیکی که معمولا در گیرنده به صورت دسی بل بیان می شود برابر با نسبت حداکثر توان ورودی به حداقل آن است به صورتی که گیرنده بتواند همچنان بازده قابل قبولی از خود ارائه دهد. بخش پردازشگر سیگنال که معمولا در بخش IF گیرنده قرار دارد، بخشی است که سیگنال مطلوب را P است که نسبت از سیگنال ناخواسته که مخل فرآیند آشکارسازی است، جدا می سازد . این بخش شامل فیلتر منطبقP4Fتوان سیگنال به نویز را در خروجی حداکثر می سازد. همچنین بخش پردازش شامل پردازشگر داپلر می باشد تا در مواقعی که بازگشتی موانع بزرگتر از نویز گیرنده است، نسبت سیگنال هدف به سیگنال موانع را برای اهداف متحرک حداکثر سازد. به این ترتیب یک هدف متحرک از سایر اهداف متحرک یا از موانع مشخص می گردد. تصمیم برای آشکارسازی، در خروجی گیرنده انجام می گیرد. در واقع حضور یک هدف در صورتی تشخیص داده می شود که خروجی گیرنده از یک سطح آستانه مشخص بیشتر شود. اگر سطح آستانه خیلی کم در نظر گرفته شود، نویز گیرنده سبب P می گردد. در حالتیکه سطح آستانه را بزرگ انتخاب کنیم امکان آشکارسازی های اشتباه یا اصطلاحا اخطار اشتباه P5F آشکارسازی برخی اهداف را از دست می دهیم. در واقع سطح آستانه برای آشکارسازی را به گونه ای انتخاب می کنند که متوسط اخطار اشتباه در گیرنده برابر با مقداری قابل قبول و از پیش معین گردد. پس از آشکارسازی، در صورت لزوم می توان هدف را ردیابی نمود. ردیابی هدف به نوعی مکان هندسی محل هدف در طول زمان است و نمونه ای از پردازش داده ها بشمار می رود. اطلاعات پردازش شده آشکارسازی هدف و یا مسیر ردیابی آن برای کاربر رادار به نمایش در می آید . همچنین این اطلاعات می تواند مستقیما در اختیار یک سیستم هدایتی مانند سیستم هدایت خودکار قرار گیرد.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
(علوم مخابرات ) انواع رادار و اهداف آن (رادار فرستنده گیرنده پالسی p و مونو استاتیکP6FP)
نویسنده: افشین رشید
انواع رادار و اهداف آن بر اساس معیارهای گوناگون می توان دسته بندی های متفاوتی را برای بیان انواع رادار ارائه داد. رادار هایی که P و رادار هایی که فرستنده و گیرنده آنها در دو فرستنده و گیرنده آنها در یک محل می باشد رادارهای مونو استاتیک P6FP نامیده می شوند. در حالت اول فاصله هدف از فرستنده و گیرنده یکسان محل متفاوت واقع شده است، بای P7F استاتیک است اما در حالت بای استاتیک اینطور نیست. در مونواستاتیک که معمولا رادارها از این نوع هستند، برای ارسال و دریافت از یک آنتن استفاده می شود.در مواردی یک سیستم رادار دارای بیش از یک فرستنده و گیرنده می باشد که به صورت P خوانده می شود. یک شبکه عمل می کنند. این سیستم P8F ها مولتی استاتیکP ، راداری است که به طور همچنین رادارها را می توان براساس سیگنال ارسالی آنها دسته بندی کرد. نوع CWP9F پیوسته و معمولا با دامنه ثابت ارسال می کند. این سیگنال ارسالی می تواند با مدولاسیون FM و یا با فرکانسی ثابت فرستاده شود. هنگامی که شکل موج ارسالی به صورت پالسی است ( بامدولاسین FM و یا بدون آن) ، رادار پالسی P و غیر فعالP1F نامیده میشود. همچنین بر اساس وجود فرستنده یا نبود آن، رادارها بترتیب به دو دسته فعال P10FP تقسیم می شوند.بر اساس وظیفه اصلی ای که بر عهده رادار است رادارهای آشکارساز P12FP ،جست و جوگر P13F ردیاب ، P14F PP و غیره P15FP را می توان نام برد.اهداف رادار دارای انواع گوناگون است که عامل مجزا کننده آنها متفاوت است . ساده ترین نوع آن که هدف تعریف می شود هدفی است که بزرگترین بعد فیزیکی آن کوچکتر از حداقل طولی است که پالس ارسال شده بدون مدولاسیون FM قادر به اندازه گیری آن است. این مقدار دقت رادار در اندازه گیری طول را مشخص می کند و برای رادار مونواستاتیک برابر با cT می باشد. T طول پالس ارسالی است. در حضور مدولاسیون FM این مقدار برابر با 2c/2B است که B پهنای باند موج ارسالی می باشد. به علت کوچک بودن این اهداف پخش شدگی ای در زمان در پالسهای بازگشتی رخ نمی دهد و شکل موج بازگشتی تغییر چندانی نمی کند. P نامیده می شوند. این اهداف در پالس های دریافتی اهدافی که اندازه آنها بزرگتر از اهداف نقطه ایست، اهداف وسیعP17Fدریافتی پخش شدگی ایجاد می کنند که بازده کار رادار را کاهش می دهد. در نظر گرفتن یک هدف به عنوان هدف وسیع نیز به پهنای باند بستگی دارد. P شمرده می شوند، مانند جنگل، زمین، کوهها و غیره که به این نوع اهداف اهداف بزرگتر جزو اهداف P18F گستردهP هم گفته می شود. دسته دیگری از اهداف پخش را اهداف حجمیP20F اهداف ناحیه ایP19FP می نامند که شامل باران، برف، ابر، ابر، مه و غیره می باشد .
اهداف متحرک اهدافی هستند که نسبت به رادار دارای حرکت اند. اگر رادار بر روی زمین به طور ساکن باشد، اهداف طبیعی مانند جنگل یا زمین چمنزار حرکات نسبتا کندی را دارا هستند و پخش شدگی کمی در طیف فرکانسی سیگنال دریافتی ایجاد می کنند. باران و شکل های مشابه نیز دارای چنین حالتی هستند. قابل توجه بودن اثر سایر پدیده های آب و هوایی مانند طوفان، گردباد و غیره به فرکانس کاری رادار بستگی دارد. اهدافی مانند موشک، هواپیمای جت، ماهواره ها به میزانی سریع هستند که جابجایی طیفی قابل توجهی (ناشی از داپلر) در سیگنال دریافتی نسبت به سیگنال ارسالی ایجاد می کنند. در حالاتی که رادار متحرک است تمامی اهداف ساکن بر روی زمین متحرک در نظر گرفته می شوند. در ایجاد داپلر سرعت نسبی رادار و هدف نسبت به هم مطرح می باشد . دسته بندی دیگر اهداف رادار، فعال یا غیر فعال بودن آنهاست. به اهدافی که از خو د انرژی تشعشع می کنند فعال گفته می شود. سایر اهداف غیر فعال هستند. یک رادار برای سیستم راداری دیگر هدفی فعال بشمار می رود. از جمله اهداف فعال می توان بدن انسان را نیز نام برد. رادارهایی که با طول موج مادون قرمز کار می کنند می توانند تشعشعات ناشی از حرارت بدن را دریافت کنند.
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک

🔴مجله علوم مخابرات (فرکانس) به بررسی انواع "رادار و سیستم های نوین مخابراتی" میپردازد .این مجله به سرپرستی "دکتر افشین رشید" و جمعی از دانشجویان برگزیده ایشان اداره میشود.🔵
نویسنده 1
نویسنده 2
نویسنده 3
نویسنده 4
نویسنده 5
نویسنده 6
نویسنده 7
نویسنده 8
نویسنده 9
نویسنده 10
نویسنده 11
آبان ۱۴۰۴
مهر ۱۴۰۴
شهریور ۱۴۰۴
مرداد ۱۴۰۴
تیر ۱۴۰۴
خرداد ۱۴۰۴
اردیبهشت ۱۴۰۴
فروردین ۱۴۰۴
اسفند ۱۴۰۳
بهمن ۱۴۰۳
دی ۱۴۰۳
آذر ۱۴۰۳
آبان ۱۴۰۳
مهر ۱۴۰۳
شهریور ۱۴۰۳
مرداد ۱۴۰۳
تیر ۱۴۰۳
خرداد ۱۴۰۳
اردیبهشت ۱۴۰۳
فروردین ۱۴۰۳
اسفند ۱۴۰۲
بهمن ۱۴۰۲
دی ۱۴۰۲
آذر ۱۴۰۲
آبان ۱۴۰۲
مهر ۱۴۰۲
شهریور ۱۴۰۲
مرداد ۱۴۰۲
تیر ۱۴۰۲
خرداد ۱۴۰۲
اردیبهشت ۱۴۰۲
فروردین ۱۴۰۲
اسفند ۱۴۰۱
بهمن ۱۴۰۱
دی ۱۴۰۱
آذر ۱۴۰۱
آبان ۱۴۰۱
مهر ۱۴۰۱
شهریور ۱۴۰۱
مرداد ۱۴۰۱
تیر ۱۴۰۱
خرداد ۱۴۰۱
اردیبهشت ۱۴۰۱
فروردین ۱۴۰۱
اسفند ۱۴۰۰
بهمن ۱۴۰۰
دی ۱۴۰۰
آذر ۱۴۰۰
آبان ۱۴۰۰
مهر ۱۴۰۰
شهریور ۱۴۰۰
مرداد ۱۴۰۰
تیر ۱۴۰۰
خرداد ۱۴۰۰
اردیبهشت ۱۴۰۰
فروردین ۱۴۰۰
اسفند ۱۳۹۹
بهمن ۱۳۹۹
دی ۱۳۹۹
آذر ۱۳۹۹
آبان ۱۳۹۹
مهر ۱۳۹۹
شهریور ۱۳۹۹
مرداد ۱۳۹۹
تیر ۱۳۹۹
خرداد ۱۳۹۹
اردیبهشت ۱۳۹۹
فروردین ۱۳۹۹
اسفند ۱۳۹۸
بهمن ۱۳۹۸
دی ۱۳۹۸
آذر ۱۳۹۸
آبان ۱۳۹۸
مهر ۱۳۹۸
شهریور ۱۳۹۸
مرداد ۱۳۹۸
تیر ۱۳۹۸
خرداد ۱۳۹۸
اردیبهشت ۱۳۹۸
فروردین ۱۳۹۸
اسفند ۱۳۹۷
بهمن ۱۳۹۷
دی ۱۳۹۷
آذر ۱۳۹۷
آبان ۱۳۹۷
مهر ۱۳۹۷
شهریور ۱۳۹۷
مرداد ۱۳۹۷
تیر ۱۳۹۷
خرداد ۱۳۹۷
اردیبهشت ۱۳۹۷
فروردین ۱۳۹۷
آنتن ها (164)
امواج (163)
الکترونیک (156)
مجله علوم مخابرات (75)
فرکانس (46)
رادار (43)
Powered By
مجله علوم مخابراتِ (فرکانس) © _ تاسیس ۱۳۹۷