رادارگریز و (رادارگریزی technology Stealth) نحوه عملکرد و کاربرد (علوم مخابرات)
نویسنده: افشین رشید

در برخی موارد رادار گریز ها با ارسال امواج VHF توسط رادار قابل شناسایی میباشند. و این ناشی از اختلافات سیگنال های بازگشتی است که در هنگام ارسال هیچ اختلافی (درواقع اختلاف فاز) با هم نداشتند. همچنین تداخل کمتر و مزایای سیگنالی بهتری در این روش نسبت به روش نامنسجم دارد.رادارگریزی (Stealth) به عمل پنهان شدن یا گریختن از دید رادار و وسایل آشکارساز گفته میشود. رادارگریزی بیش از اینکه یک تکنولوژی باشد، یک مفهوم است که گستره وسیعی از تکنولوژی ها و ویژگی های طراحی را در بر می گیرد. به عنوان یک مفهوم، رادارگریزی چیز جدیدی نیست. در مورد هواپیما ها، رادارگریزی به معنی پنهان شدن در برابر آشکار سازی توسط رادار است.
در کل میتوان گفت فناوری رادارگریزی/Stealth technology» به مجموعهای از اقدامات متقابل الکترونیکی و تاکتیکهای نظامی است که باعث سختتر شدن شناسایی تجهیزات و تسلیحات نظامی توسط رادار دشمن میشود.این تکنولوژی با این که نمیتواند به طور کامل امکان شناسایی هواپیما، زیردریایی، موشک یا ناو یا هر وسیله رادارگریز دیگری را از بین ببرد. اما با کاهش سطح مقطع راداری آن، فاصلهای که رادار میتواند به طور موثر آن را شناسایی کند به شدت کاهش میدهد. تاکتیکهایی مانند پرواز در ارتفاع بسیار پایین یا بالا، طراحی بدنه به شکلی که امواج راداری را منحرف کنند یا استفاده از موادی که امواج راداری را جذب میکنند از جمله روشهایی است که برای رادارگریز کردن یک شی استفاده میشوند.
چرا رادارگریزی؟؟؟
در مورد هواپیماها، رادارگریزی به معنی پنهان شدن در برابر آشکار سازی توسط رادار است. پس از جنگ دوم جهانی برخی طراحان هواپیما و استراتژیست ها نیاز به طراحی هواپیمایی که خط اثر راداری (radar signature) کوچکی داشته باشد را احساس کردند (یک خط اثر راداری بزرگی اثری است که یک هواپیما بر روی صفحه رادار در یک زاویه و مسافت مشخص بجای می گذارد. از خط اثر راداری اغلب به سطح مقطع راداری یا radar cross section یاد می شود). ولیکن به مدت چندین سال، توانایی آنها برای پنهان شدن از رادار به دلایل متعددی محدود بود. یک محدودیت عمده، ناتوانی طراحان هواپیما در تعیین نحوه دقیق انعکاس امواج رادار از روی هواپیما بود. و با شناسایی در رادار مورد هدف سیستم های پرتاب زمینی موشک قرار میگرفت .
برای همین رویکرد رادارگریزی مورد توجه قرار گرفت.
برچسبها: علوم مخابرات, مخابرات, مجله علوم مخابرات, فرکانس
مهمترین اعمالی که یک رادار می تواند انجام دهد(علومِ مخابرات)
مهمترین اعمالی که یک رادار می تواند انجام دهد عبارتند از :
1 -واضح سازی اهداف ، 2 -آشکارسازی ، 3 -اندازه گیری ، 4 -دسته بندی
واضح سازی اهداف مربوط به توانایی رادار در جداسازی سیگنال هدف مطلوب از دیگر اهداف و جداسازی سیگنال مطلوب از سیگنالهای نامطلوب (نویز و موانع) می باشد . در حالت ایده آل می خواهیم که سیگنال اهداف مختلف مستقل از نزدیکی آنها به یکدیگر، از هم متمایز باشند . یکی از عوامل موثر در قابلیت تمایز بین اهداف، سیگنال ارسالی است. پهنای باند بزرگتر برای سیگنال ارسالی وضوح بهتری در پارامتر فاصله را در پی دارد. در حالیکه طول پالس طولانی تر منجر به وضوح بیشتری در فرکانس می گردد. همچنین خصوصیات آنتن نیز در آن موثر است. آنتن ها یی با پهنای باند فضایی کوچک وضوح بهتری را در موقعیت هدف نتیجه می دهد. عمل آشکارسازی شامل تشخیص حضور سیگنال بازگشتی از هدف مطلوب است. این مسئله به ظاهر ساده بنظر می رسد، اما در عمل به علت وجود سیگنال های ناخواسته و نویز گیرنده، عملی پیچیده است. می توان با طراحی مناسب گیرنده و ارسال سیگنالی با انرژی بیشتر در هر پالس اثر نویز را کاهش داد. همچنین با طراحی سیگنال ارسالی و روشهای پردازش سیگنال می توان میزان حضور سیگنال موانع را کم کرد. برای مشخص شدن محل جسم به تعریف دستگاه مختصات نیاز داریم.
اندازه گیری فاصله هدف بطور ضمنی در نام رادار نهفته است. اگر چه امروزه رادار های مدرن معمولا پارامترهایی بیشتر از فاصله شعاعی را اندازه گیری می کنند. آنها قادرند موقعیت هدف در فضای سه بعدی، بردار سرعت هدف (شامل سرعت آن در سه مولفه فضا)، جهت زاویه ای و بردار سرعت زاویه ای (نرخ تغییر زاویه در هر دو مولفه زاویه ای) را نیز بدست آورند. تمام این اندازه گیری ها می تواند بطور همزمان برای چند هدف در شرایطی که نویز و موانع نیز حضور دارند، محاسبه شود. اندازه سرعت شعاعی هدف با تغییر فاصله در یک بازه زمانی و یا از طرق شیفت فرکانس داپلر قابل اندازه گیری است. سرعت مطلق و جهت حرکت یک هدف متحرک با ردیابی آن می تواند بدست آید که از اندازه گیری های رادار از محل هدف در یک بازه زمانی محاسبه می شود. به همین روش می توان سرعت زوایه ای را نیز اندازه گیری کرد. بدست آوردن جهت زاویه هدف در یک بعد زاویه ای توسط دو بیم آنتن انجام می شود. این دو بیم به میزان کمی در زاویه جابجا می شوند و با مقایسه اندازه بازگشتی دریافت شده در هر بیم، اندازه زاویه بدست می آید. برای اندازه گیری در هر دو بعد زاویه ای به چهار بیم آنتن نیاز داریم و دقت این اندازه گیری به اندازه آنتن وابسته می باشد . صفحه نمایش رادار برای نشان دادن نتایج بدست آمده به صورت بصری برای کاربر می باشد و دارای انواع مختلفی است. سه نوع از نمایشگرهایی که امروزه در رادارهای کلاسیک بیشتر مورد استفاده قرار می گیرد
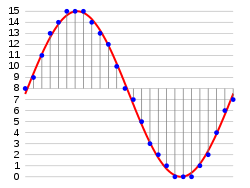
در اسکوپ تصویر بالا ، جهت عمودی، تابعی از قدرت سیگنال پوش موج بازگشتی از هدف است. این تابعیت می تواند به صورت خطی یا لگاریتمی باشد .
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک
نحوه کاربرد امواج UFL در علوم مخابرات
تحریک و انتشار امواج الکترومغناطیسی در باندهای فرکانسی بسیار پایین در جو زمین، کاربردهای بسیاری در زمینههای مختلف، از جمله فیزیک فضا، ارتباطات رادیویی و پیشنشانگری زلزله دارد. لذا این طیف فرکانسی همواره مورد توجه پژوهشگران بوده است. با توجه به پیچیدگیهای بسیار زیاد، مطالعه و بررسی تحریک این نوع امواج الکترومغناطیسی همواره مشکل بوده است. تحریک امواج رادیویی در طیف فرکانسی بینهایت پایین (ULF (Ultra Low Frequency (300 Hz to 3 kHz)) و ELF (Extremely Low Frequency (3 to 30 Hz))) در بازه فرکانسی 3 هرتز تا ۳ کیلوهرتز، و طیف فرکانسی خیلی پایین (VLF (Very Low Frequency (3 to 30 kHz))) در بازه فرکانسی ۳ تا ۳۰ کیلوهرتز در لایه E (یون_سپِهر)، در ارتفاع 8۰ تا ۱۲۰ کیلومتری از سطح زمین میباشد. در این عملکرد ها از روشهای عددی، برای تحریک جریان الکتریکی، و ایجاد آنتن مجازی در لایه پلاسما برای تولید امواج VLF استفاده شده است. نحوه کاربرد امواج UFL در علوم مخابرات همچنین تحریک لایه پلاسما و تغییر میزان ضرایب هدایت با استفاده از امواج الکترومغناطیسی باند فرکانسی بالا HF (High Frequency) تاکنون مورد استفاده قرار گرفته است. مدل عددی مورد استفاده در این امواج شامل قوانین ماکسول و ضرایب رسانایی لایه (یون_سپِهر) میباشد که در نوع خود منحصر بفرد است. این مدل تغییرات لایه یونسپهر بر روی انتشار امواج ارسالی، و همچنین تحریک امواج ثانویه را از طریق ترکیب ضرایب هدایت با قوانین ماکسول برای پیش بینی زلزله شبیهسازی میکنند، بهطوریکه زمان انجام محاسبات تا حد قابل توجهی کاهش مییابد. نتایج نشان میدهد که آنتنهای زمین پایه در باند فرکانسی ELF دارای بازدهی بسیار خوبی بوده و میتوانند جایگزین مناسبی برای ایجاد این امواج توسط فرستندههای قوی باند HF که به گرمکننده لایه بالای جو معروف هستند، باشند. همچنین میزان نفوذ موج پالسی در لایه (یون_سپِهر) کمتر از۱۰ کیلومتر در فرکانس ۱۰۰ هرتز بوده و امواج تحریکی دارای سرعت انتشار در حدود ۱۰۰۰ کیلومتر بر ثانیه میباشند. میزان نفوذ امواج الکترومغناطیسی در جو زمین با افزایش فرکانس ارسالی به طیف فرکانسی خیلی پایین VLF بهمیزان بسیار زیادی کاهش مییابد. | |
برچسبها: امواج, آنتن ها, علوم مخابرات, الکترونیک

🔴مجله علوم مخابرات (فرکانس) به بررسی انواع "رادار و سیستم های نوین مخابراتی" میپردازد .این مجله به سرپرستی "دکتر افشین رشید" و جمعی از دانشجویان برگزیده ایشان اداره میشود.🔵
نویسنده 1
نویسنده 2
نویسنده 3
نویسنده 4
نویسنده 5
نویسنده 6
نویسنده 7
نویسنده 8
نویسنده 9
نویسنده 10
نویسنده 11
آبان ۱۴۰۴
مهر ۱۴۰۴
شهریور ۱۴۰۴
مرداد ۱۴۰۴
تیر ۱۴۰۴
خرداد ۱۴۰۴
اردیبهشت ۱۴۰۴
فروردین ۱۴۰۴
اسفند ۱۴۰۳
بهمن ۱۴۰۳
دی ۱۴۰۳
آذر ۱۴۰۳
آبان ۱۴۰۳
مهر ۱۴۰۳
شهریور ۱۴۰۳
مرداد ۱۴۰۳
تیر ۱۴۰۳
خرداد ۱۴۰۳
اردیبهشت ۱۴۰۳
فروردین ۱۴۰۳
اسفند ۱۴۰۲
بهمن ۱۴۰۲
دی ۱۴۰۲
آذر ۱۴۰۲
آبان ۱۴۰۲
مهر ۱۴۰۲
شهریور ۱۴۰۲
مرداد ۱۴۰۲
تیر ۱۴۰۲
خرداد ۱۴۰۲
اردیبهشت ۱۴۰۲
فروردین ۱۴۰۲
اسفند ۱۴۰۱
بهمن ۱۴۰۱
دی ۱۴۰۱
آذر ۱۴۰۱
آبان ۱۴۰۱
مهر ۱۴۰۱
شهریور ۱۴۰۱
مرداد ۱۴۰۱
تیر ۱۴۰۱
خرداد ۱۴۰۱
اردیبهشت ۱۴۰۱
فروردین ۱۴۰۱
اسفند ۱۴۰۰
بهمن ۱۴۰۰
دی ۱۴۰۰
آذر ۱۴۰۰
آبان ۱۴۰۰
مهر ۱۴۰۰
شهریور ۱۴۰۰
مرداد ۱۴۰۰
تیر ۱۴۰۰
خرداد ۱۴۰۰
اردیبهشت ۱۴۰۰
فروردین ۱۴۰۰
اسفند ۱۳۹۹
بهمن ۱۳۹۹
دی ۱۳۹۹
آذر ۱۳۹۹
آبان ۱۳۹۹
مهر ۱۳۹۹
شهریور ۱۳۹۹
مرداد ۱۳۹۹
تیر ۱۳۹۹
خرداد ۱۳۹۹
اردیبهشت ۱۳۹۹
فروردین ۱۳۹۹
اسفند ۱۳۹۸
بهمن ۱۳۹۸
دی ۱۳۹۸
آذر ۱۳۹۸
آبان ۱۳۹۸
مهر ۱۳۹۸
شهریور ۱۳۹۸
مرداد ۱۳۹۸
تیر ۱۳۹۸
خرداد ۱۳۹۸
اردیبهشت ۱۳۹۸
فروردین ۱۳۹۸
اسفند ۱۳۹۷
بهمن ۱۳۹۷
دی ۱۳۹۷
آذر ۱۳۹۷
آبان ۱۳۹۷
مهر ۱۳۹۷
شهریور ۱۳۹۷
مرداد ۱۳۹۷
تیر ۱۳۹۷
خرداد ۱۳۹۷
اردیبهشت ۱۳۹۷
فروردین ۱۳۹۷
آنتن ها (164)
امواج (163)
الکترونیک (156)
مجله علوم مخابرات (75)
فرکانس (46)
رادار (43)
Powered By
مجله علوم مخابراتِ (فرکانس) © _ تاسیس ۱۳۹۷